変形可能な4輪型不整地移動ロボットの開発

キーワード
研究シーズの紹介
近年、農業の分野においてもロボットの利用が期待され、研究が推進されている。例えば、草刈りロボットなど、草におおわれた地面を移動する場合、車輪の滑りが容易に発生するため、移動機構の設計においては、この滑りを考慮する必要がある。特に、斜面を横断する場合には、ロボットの重心位置によっては横滑りの影響を受けやすく、最悪の場合、滑りが生じることでロボットの転倒に繋がる可能性がある。そのため、滑りを回避する移動機構が求められる。
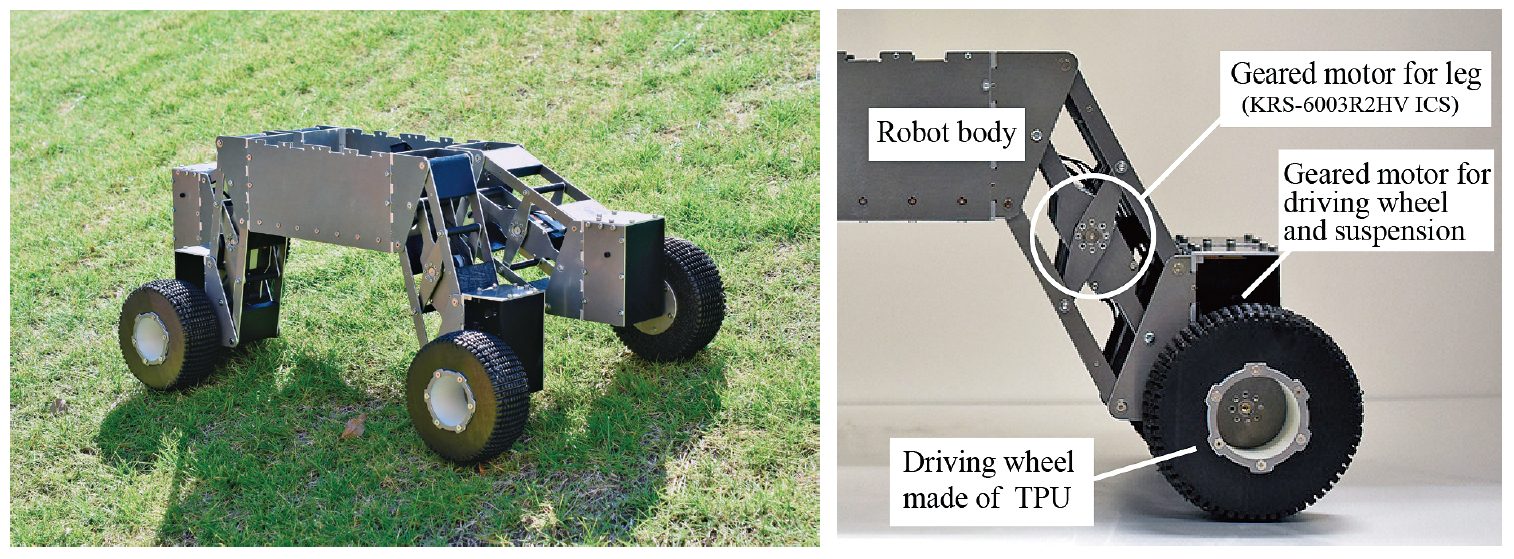
本研究では、草地などの滑りやすい不整地において、斜面における横滑りにも対応する移動機構として、アクティブな関節をもつ四輪型移動ロボットを提案する。
Point
不整地移動 斜面横断
- 滑りやすい芝生斜面などの上で,安定した移動が可能
- 屋外作業用移動ロボットのプラットフォームとして利用可能
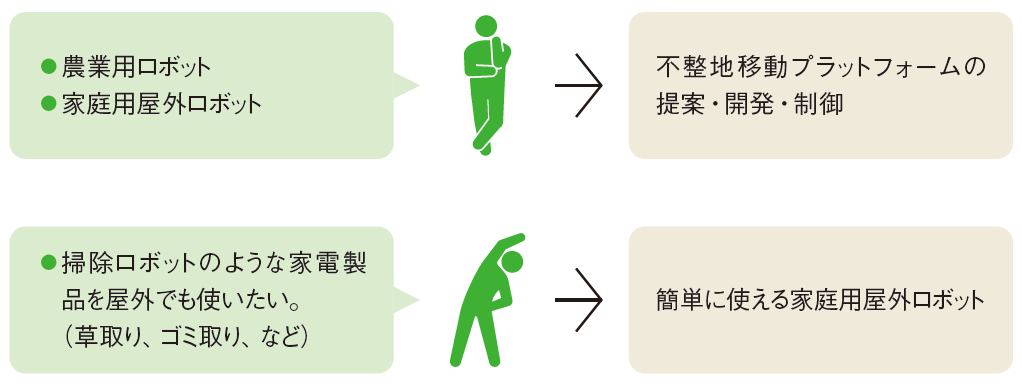
期待される活用シーン
その他の研究テーマ
- 車輪型ホームロボットに関する研究
研究者

理工学部 機械工学科
教授
牛見 宣博