スマート農業を支える変形可能な4輪型不整地移動ロボットの開発


キーワード
研究シーズの紹介
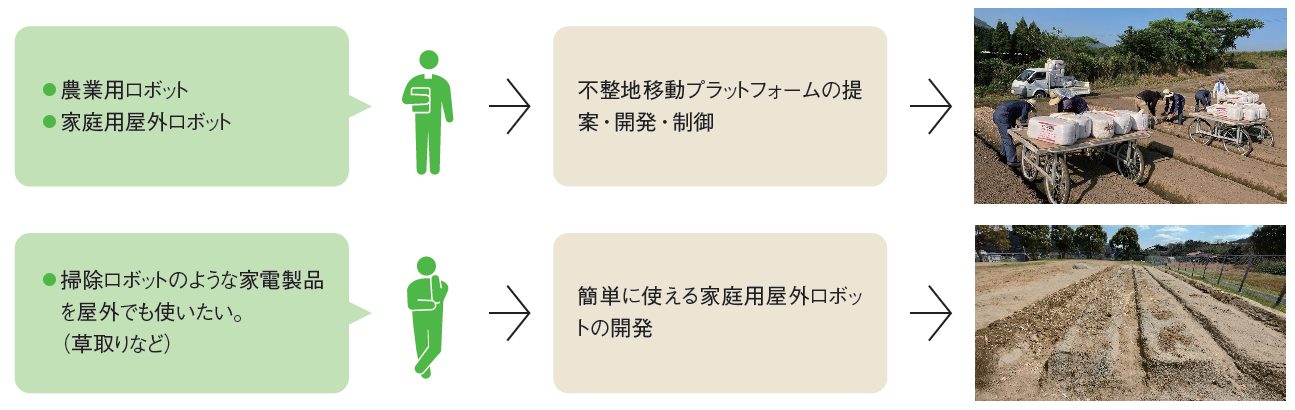
本研究では、スマート農業用の移動ロボットプラットフォームを提供します。現在、日本の食料自給率は低く、安定的な食糧供給のためには食料生産の向上は必須です。しかし農業従事者の高齢化や減少が大きな課題となっており、農業労働を軽減させるため、最先端のICTやAIを活用したスマート農業に期待が集まります。実際の現場において先端技術を活用するためには、ICTやAIなどのソフトウェアだけではなく、我々人間に変わって作業を行うロボット(ハードウェア)が必要不可欠です。
農作物を育てる圃場や、斜面の果樹園などにおいて、安定して移動走行が可能な4輪独立姿勢制御機能を備えた車輪型移動ロボットの開発を進めています。農作業に適した耐荷重性能の高い移動機構の開発と実験について、実験用圃場において検討を行っています。
【研究者情報】
理工学部 機械工学科 牛見 宣博
Point
不整地移動技術
- 圃場や斜面において安定した移動が可能
- 屋外作業用の移動ロボットプラットフォームとして利用可能

期待される活用シーン
その他の研究テーマ
- 無電力起立訓練補助器具の開発
- 移動式浴槽掃除ロボットに関する研究
研究者

理工学部 機械工学科
教授
牛見 宣博