重度障害者の自立移動を支援するロボットストレッチャー

キーワード
研究シーズの紹介
障害者の能力を補綴し自立を支援するため、2004年度から障害者の自立移動機器(ロボットストレッチャー)を開発し実証実験をしてきました。
本研究では、対象ユーザの障害状況に応じた操作スイッチ、直進・旋回のコマンドインターフェース、周囲配置カメラからの画像提示、安全性確保のなどの実績を積み上げてきました。これに加え、直進性などの操作支援技術、周囲画像提示などの認識支援技術、衝突時などの安全性を向上し実用化をめざします。さらに将来は、移動に加えVR,AR,テレイグジスタンス技術を応用した能力拡張技術へ発展させ、障害特性に応じた支援技術でリモートワークする等障害者が活躍する社会を展望します。理工学部(機械・情報)、芸術学部で推進していきます。
【研究者情報】
理工学部 機械工学科 榊 泰輔
Point
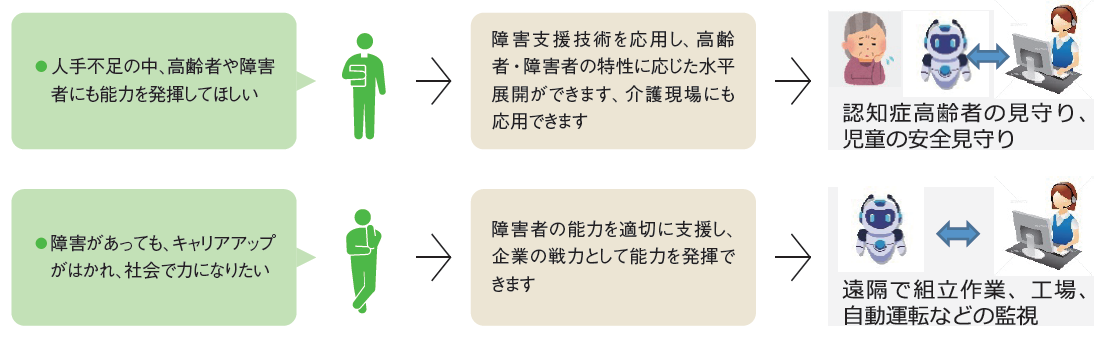
障害者支援技術
- 虚弱な指であっても、巧みな車体操作が可能です。
- 側臥位で視野が狭くても、周囲環境を認識しながら操作できます。
- リスクアセスメントにより、安全性を高めます。

期待される活用シーン
その他の研究テーマ
- 歩行リハビリロボット、転倒リスク推定システム、介護者アシストスーツ、介護用リフト、アバター応用見守りシステムなど、地域包括ケアシステムの支援技術
研究者

理工学部 機械工学科
教授
榊 泰輔