画像情報を用いたロボット指先の摩擦の推定に関する研究

キーワード
研究シーズの紹介
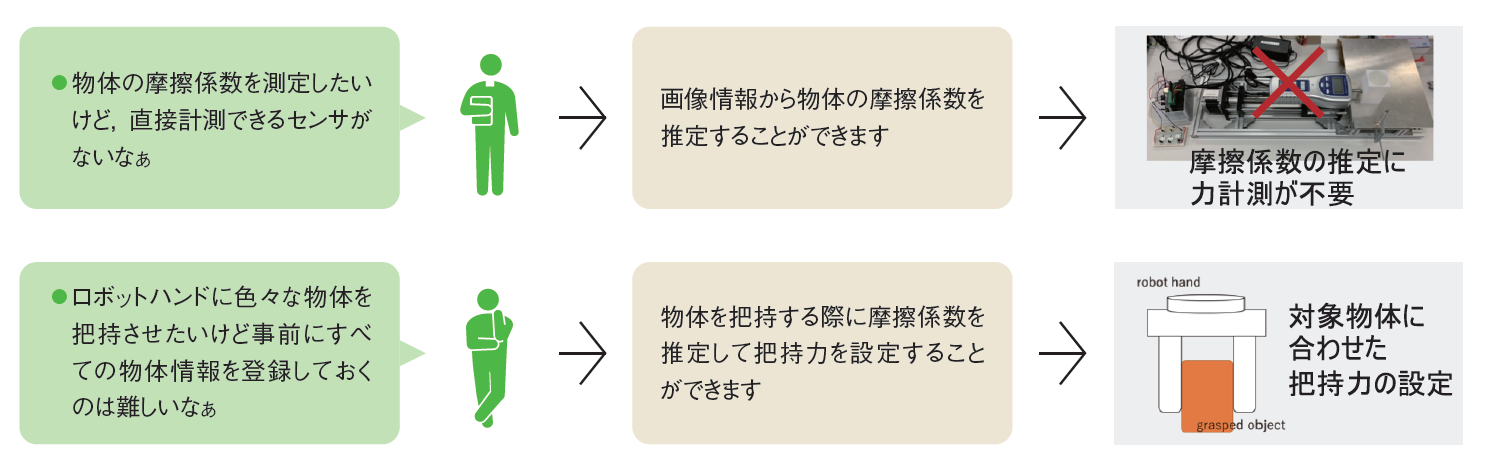
ロボットハンドは主に工場での組立作業等で利用されています。工場では部品などロボットハンドが取り扱う物体の摩擦係数や重量等の情報が既知であるので,強すぎず弱すぎない最適な力で把持できます。一方,ロボットハンドの適用範囲が家庭など工場以外へと今後拡大すると,把持しようとする物体の摩擦係数や重量等の情報が分からず最適な把持力を設定できない状況が起こります。
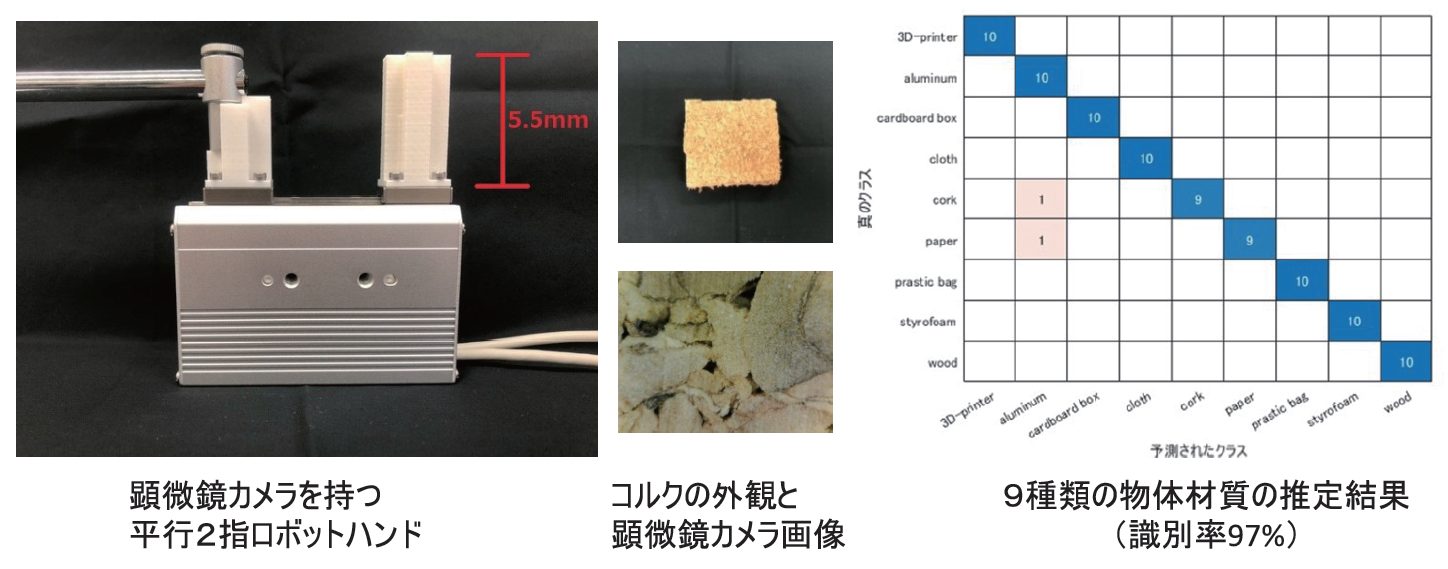
本研究では未知の把持物体の摩擦係数を推定する手法を提案しています。ロボットハンドの指先に顕微鏡カメラを装着し,物体把持を行う際に対象物体の表面を撮影します。得られた物体表面画像に対して機械学習を適用することで摩擦係数を推定します.推定した摩擦係数に基づいて,過度に大きすぎずかつ小さすぎない適切な力で物体把持を行えます。
【研究者情報】
理工学部 機械工学科 村上 剛司
Point
顕微画像情報から摩擦係数を推定
- ロボットハンドの把持対象物体の摩擦係数を推定できます
- ロボットハンドで未知の物体を把持する際の把持力を推定した摩擦係数に基づいて設定できます
期待される活用シーン
その他の研究テーマ
- 介護現場へのIoT技術の適用に関する研究
- 多指ロボットハンドの指先型触覚センサに関する研究
研究者
理工学部 機械工学科
教授
村上 剛司