HDLを用いた発展型論理回路演習課題の研究


キーワード
研究シーズの紹介
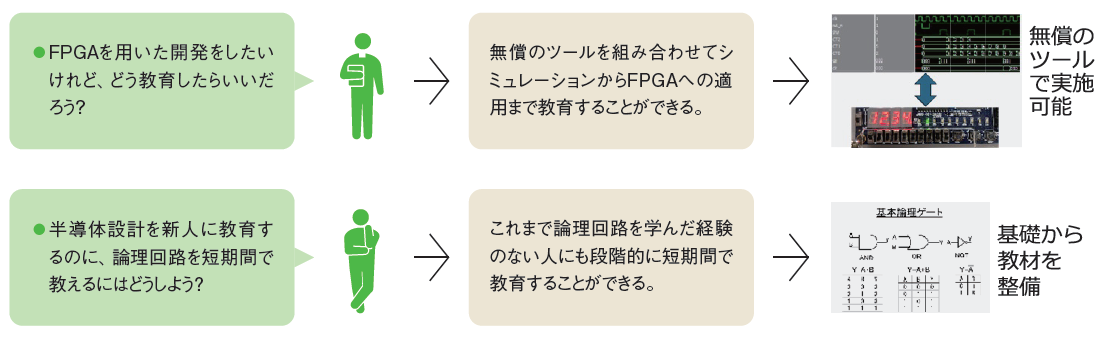
論理回路は情報機器や家電製品、自動車や産業機械などありとあらゆる電子機器の制御に用いられている。論理回路の開発現場では、ハードウェア記述言語(以下、HDLと略す)を用いて、プログラムのように回路の入出力や動作を記述することで回路設計を行うことが主流となっている。
論理回路設計を学び始める初学者にとっては、教科書に載っている知識を実用的な設計に適用することに難しさを感じることが多い。本研究では簡単な仕様から実用的な仕様に演習課題を発展させる発展型論理回路演習課題を検討している。この演習課題をHDLを用いて学習させることにより、短時間で論理回路の設計手法を修得させることができると考えられる。
【研究者情報】
理工学部 情報科学科 澤田 直
Point
発展型演習課題
- 基本仕様から発展的に学習が可能です。
- 実用的な論理回路の設計技術を修得することができます。

期待される活用シーン
研究者

理工学部 情報科学科
教授
澤田 直