



⑤ 4輪型移動機構の設計
移動機構は畝と畝の間にある凹凸の溝に沿って移動する必要があります。
4輪型移動機構の設計においては、敷き藁の供給・ほぐし・散布機構をロボット本体の上部に設置し、不整地を移動する必要があります。
また、敷き藁の散布において均一な散布を実現するためには、敷き藁ほぐし機構、及び、敷き藁散布機構装置を水平に保つ必要性があることが、④敷き藁散布機構の開発中における検証実験でも明らかになっています。
例えば、実際の圃場において確認した凹凸により、敷き藁散布機構装置に傾きがあった場合には、図16に示されるように左右に明らかな違いを確認することができました。
4輪独立の姿勢制御機構を持つ移動機構本体を設計するために、(1)制御手法を明らかにし(2)敷き藁ほぐし機構を搭載する車輪型ロボットの開発を進めました。
ロボットの4輪独立姿勢制御機構を制御するために、図17に示すようにロボット本体のモデル化を行い、4つの車輪の接地点の高さが異なる場合において、ロボットの姿勢をどのように制御するかについて検討しました。
制御のアイデアとしては、4つの車輪の接地点から仮想的な平面を作成します。そのときのロボットの姿勢について定式化を行うことで、移動方向に対するロボット本体のロールとピッチをセンサーによって推定することができれば、4つの車輪の高さについて簡潔に制御を行うことが可能であることがわかりました。
現場で使用されるロボットを開発するためには、車輪型ロボットの開発において、移動機構の簡略化は重要です。また、整備性やコストを考慮した場合、必要とされる特性を維持しながら駆動部を少なくすることでトラブルの確率を下げる必要性があります。
本研究で開発する移動ロボットは、屋外での利用が主であり、特に畑を移動する必要があります。
新たに設計した4輪独立姿勢制御機構を持つ移動ロボットを図18に示します。駆動用モータの取り付け位置を上部にすることで防水対策に対応しやすくなります。また、駆動モータを左右2個として4輪を駆動する機構を採用しました。
4つの車輪の高さについては、ボールねじを利用して独立して制御可能な機構とすることで、図17に示した姿勢制御のモデル化に対応させます。なお、敷き藁作業に利用する移動機構には、高速な移動は必要ないため、耐荷重を考慮した設計となっています。
-

図16 敷き藁散布機構の傾きが与える影響
敷き藁散布に機構装置に傾きがあった場合には、左右に明らかな違いを確認することができました。
-
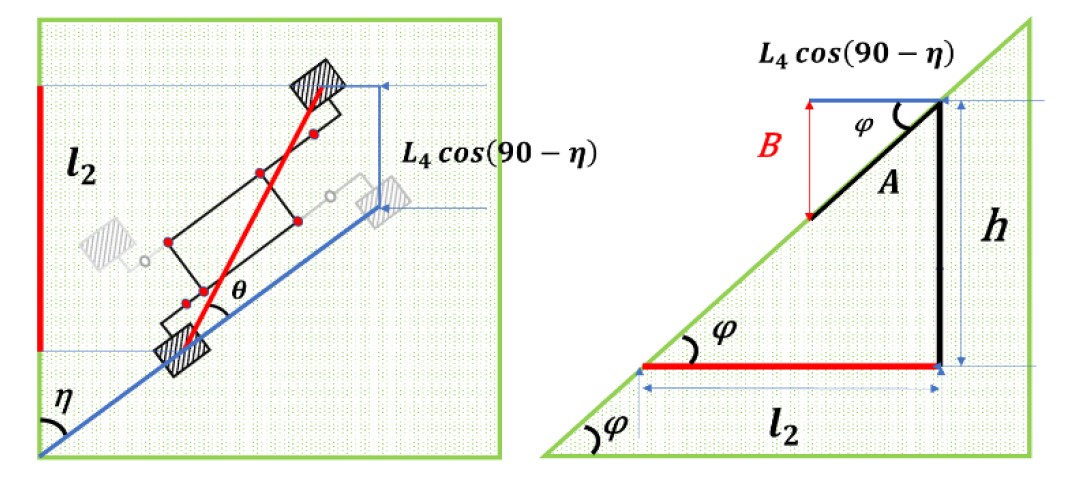
図17 ロボットのモデル化
4輪独立姿勢制御におけるロボットのモデル化を行いました。
-
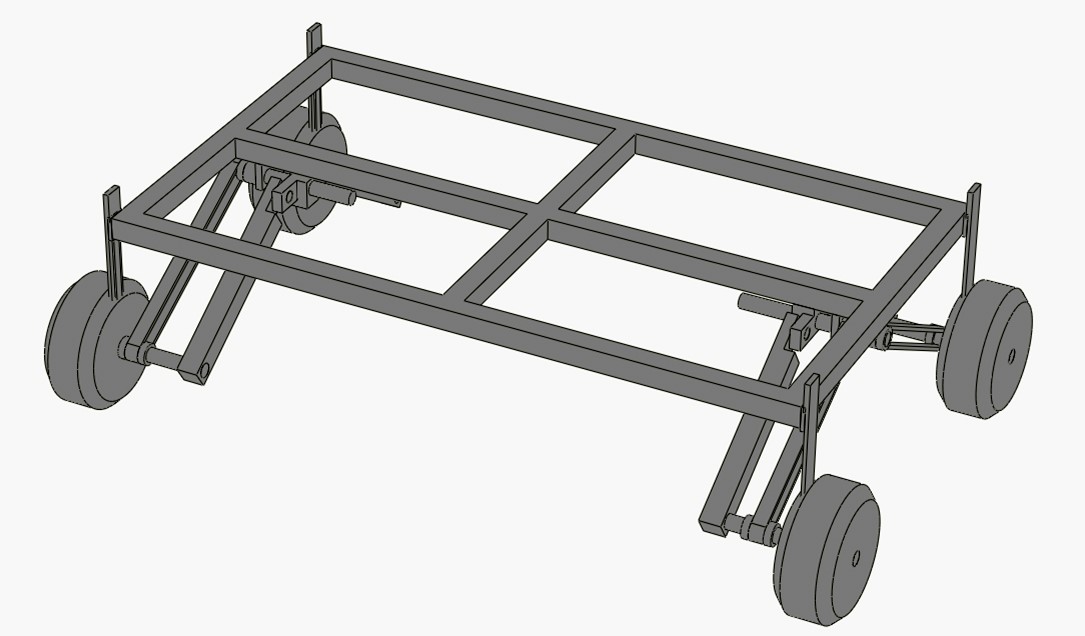
図18 4輪独立姿勢制御機構を持つ移動ロボット
新たに設計した4輪独立姿勢制御機構を持つ移動ロボットです。