



ほぐし機構の開発
敷き藁ブロックで、まず重要となるのがほぐし作業です。農業従事者の協力のもと、現地調査において体験したほぐし作業を機械・ロボット化します。
農業従事者の経験による敷き藁のほぐし作業(①敷き藁作業の体験(現場調査,意見交換)図3 参照)、及び、図7に示されるように実際に使用される敷き藁(ケイントップ)の塊を調査しました。20kgに圧縮された敷き藁には異方性があり、ほぐす方向によってほぐしやすさが異なることが実験により明らかになりました。
さらに、図8に示されるように、特別な刃物ではなく、ある方向から一定の力を付加することで、ケイントップをほぐすことが可能であることを確認しました。
敷き藁ブロックのほぐし作業についての調査結果より、本ロボットを利用する農業従事者への安全性を考慮して、刃物ではなく別アプローチを議論しながら設計を行いました。
最終的に試作機として設計した敷き藁ほぐし機構の外観を図9に示します。本機構は敷き藁の材料となるケイントップの異方性を考慮し、新たなアイデアとしてメッシュパネルを用いたほぐし機構を提案しています。刃物を利用しないことで、農業従事者への安全性を配慮しながらも汎用性のある部品を使うことで、将来的なコスト削減にも繋がる設計となっています。
ほぐしに使用されるメッシュパネルについては、基礎実験を重ねながら最適なメッシュの大きさ(50mm×50mm)を決定しました。また、ほぐした敷き藁は、ほぐし機構の下部に設置されたスライダーから畑に散布可能となっています。
なお、メッシュパネルを使った基礎実験の様子を図10に示します。実験においてはケイントップをほぐす方向を変えることで異方性を確認することができました。
装置の組み立てを実施し開発したほぐし機構(散布機構、及び、台車を含む)の外観を図11に示します。図11において、ほぐし作業はメッシュパネルによって行われます。
メッシュパネル部の拡大写真を図12に示します。図12において、メッシュパネルによってほぐされた敷き藁(ケイントップ)は、そのまま落下し、下部に設置された敷き藁の散布機構に送られる構造になっています。
-

図7 ケイントップの調査
実際に使用される敷き藁(ケイントップ)の塊を調査しました。20kgに圧縮された敷き藁には異方性があり、ほぐす方向によってほぐしやすさが異なることが実験により明らかになりました。
-

図8 ケイントップのほぐし作業
特別な刃物ではなく、ある方向から一定の力を付加することで、ケイントップをほぐすことが可能であることを確認しました。
-
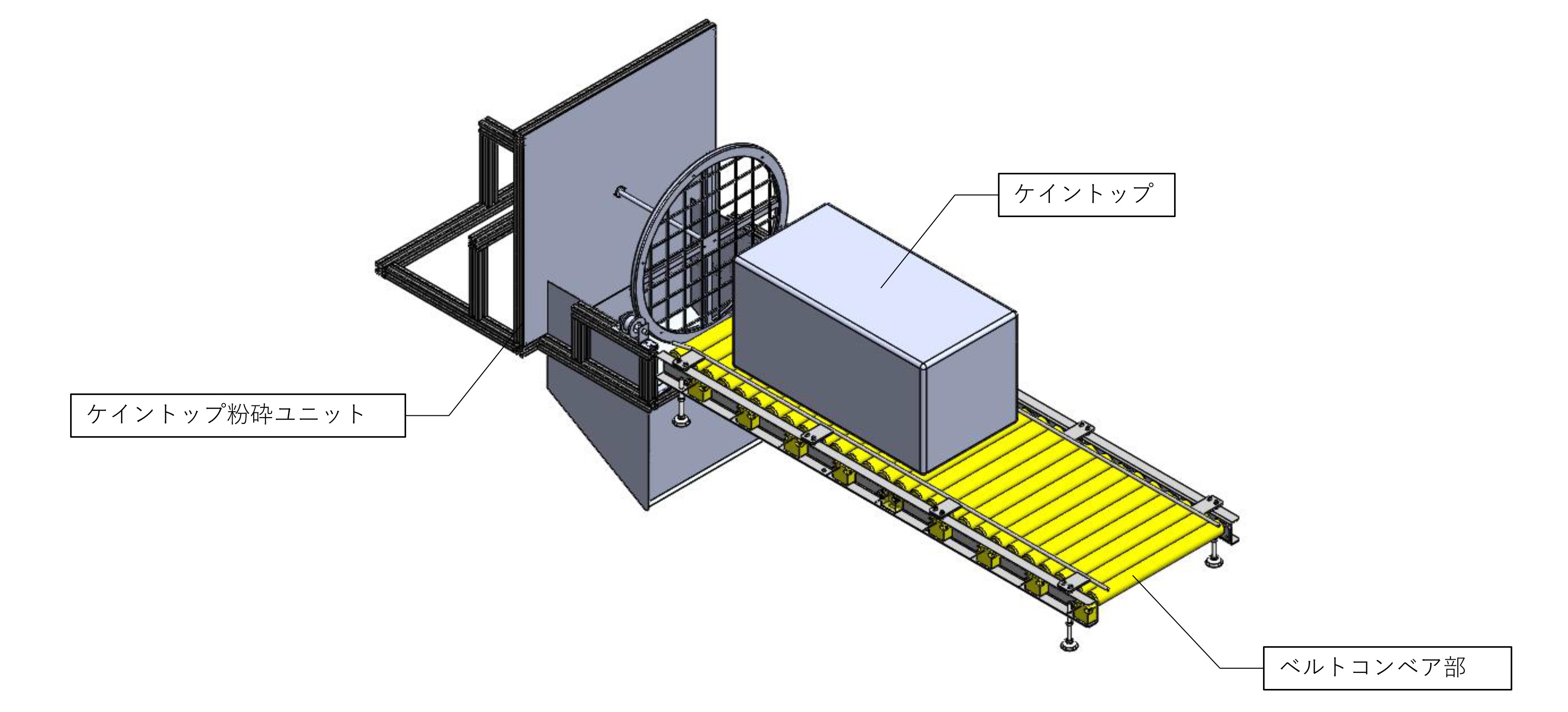
図9 敷き藁ほぐし機構の外観
試作機の外観です。本機構は敷き藁の材料となるケイントップの異方性を考慮し、新たなアイデアとしてメッシュパネルを用いたほぐし機構を提案しています。
-

図10-1 基礎実験の様子
メッシュパネルによるほぐし作業の様子です。ほぐしに使用されるメッシュパネルについては、基礎実験を重ねながら最適なメッシュの大きさ(50mm×50mm)を決定しました。
-

図10-2 基礎実験の様子
ケイントップをほぐす方向を変えることで異方性を確認することができました。
-

図11 敷き藁ほぐし機構の外観
開発したほぐし機構(散布機構、及び、台車を含む)の外観です。ほぐし作業はメッシュパネルによって行われます。
-

図12 メッシュパネル部の写真
メッシュパネルによってほぐされた敷き藁(ケイントップ)は、そのまま落下し、下部に設置された敷き藁の散布機構に送られる構造になっています。
敷き藁ブロックの供給
敷き藁ブロックの供給機構については、ベルトコンベア(品名:モータローラコンベア)を利用する形としました。
また、敷き藁の散布については、現地での手作業による散布より、畝に必要とされるケイントップの量として、例えば、幅0.8m、長さ90mの畝においては、2.5個(50kg)必要であることがわかっています。
従って、検証実験においては、ロボットの移動速度とほぐし速度を調整することで、均一な敷き藁散布を実施する必要があることがわかりました。