



⑥ 4輪型移動機構の開発(自立型)
2023年度は、検証実験のやりやすさや実験環境を考慮して、1/2スケールでの開発を進めました。⑤4輪型移動機構の設計図18に示される基本設計に基づき、一部改良を行いながら開発した移動機構を図19に示します。
開発した移動機構には4輪独立の姿勢制御機構を搭載し、圃場の凹凸に対応してロボット上面を水平に保つことが可能となっています。これにより、敷き藁の散布においても均一な散布が期待できます。なお、移動速度については、最終的には敷き藁の散布速度との調整が必要となります。
-
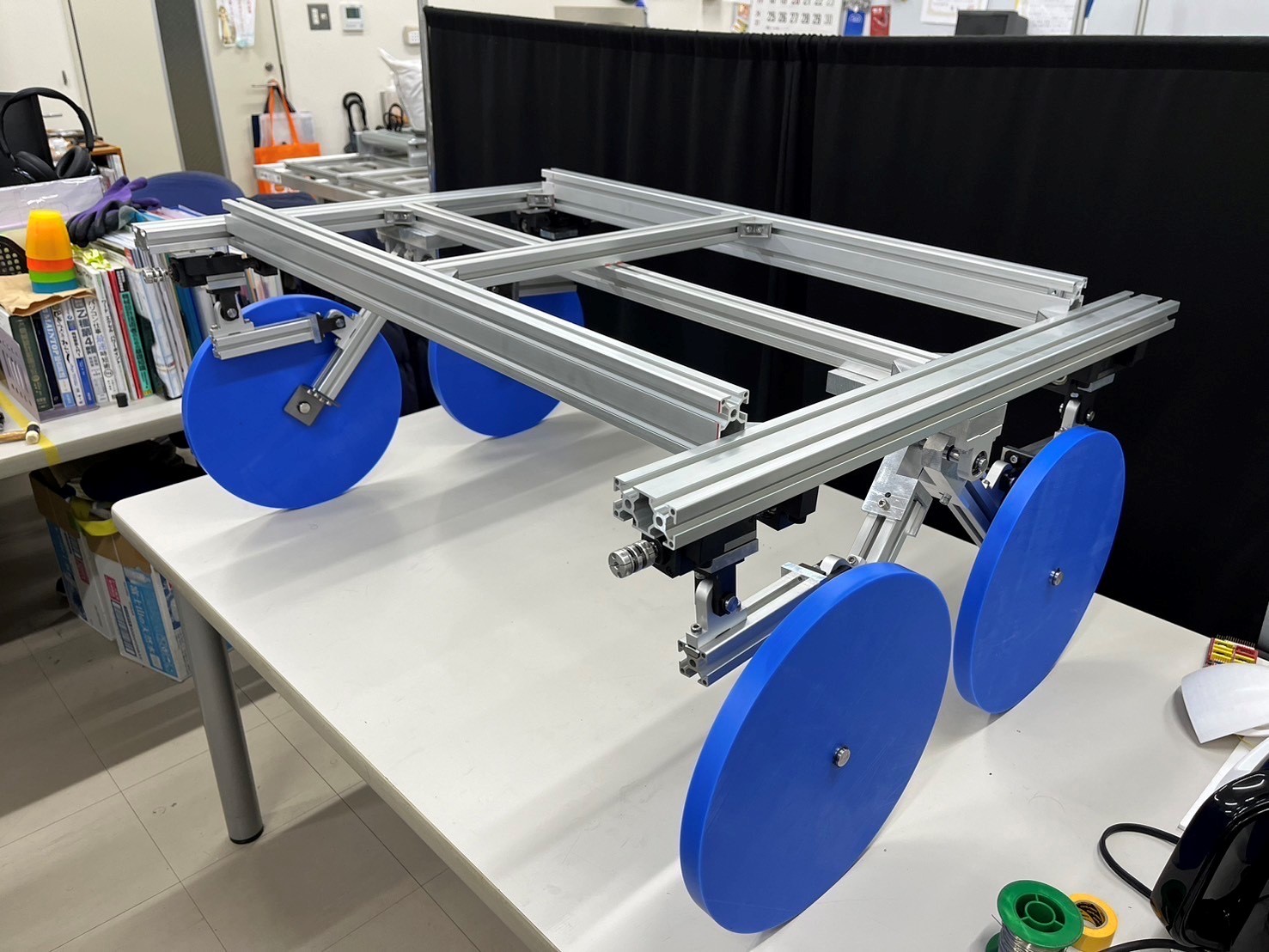
図19 開発したロボットの外観
一部改良を行いながら開発した移動機構です。