①敷き藁散布ロボットによる検証実験(敷き藁の散布)で述べたとおり、目標とする敷き藁の量(550g/m)を如何に均一に散布するかを考える必要があります。
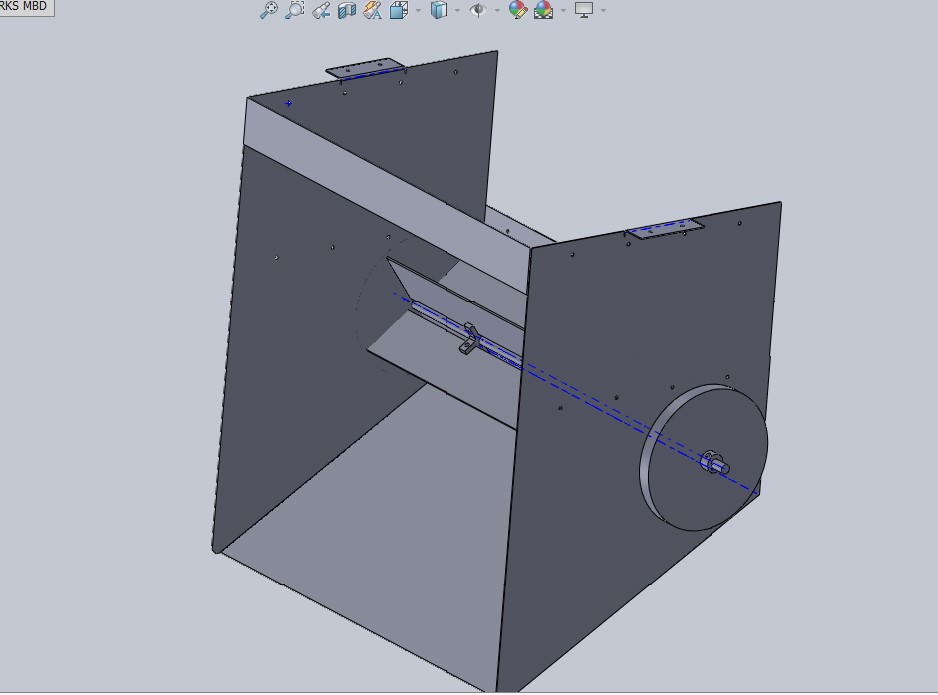
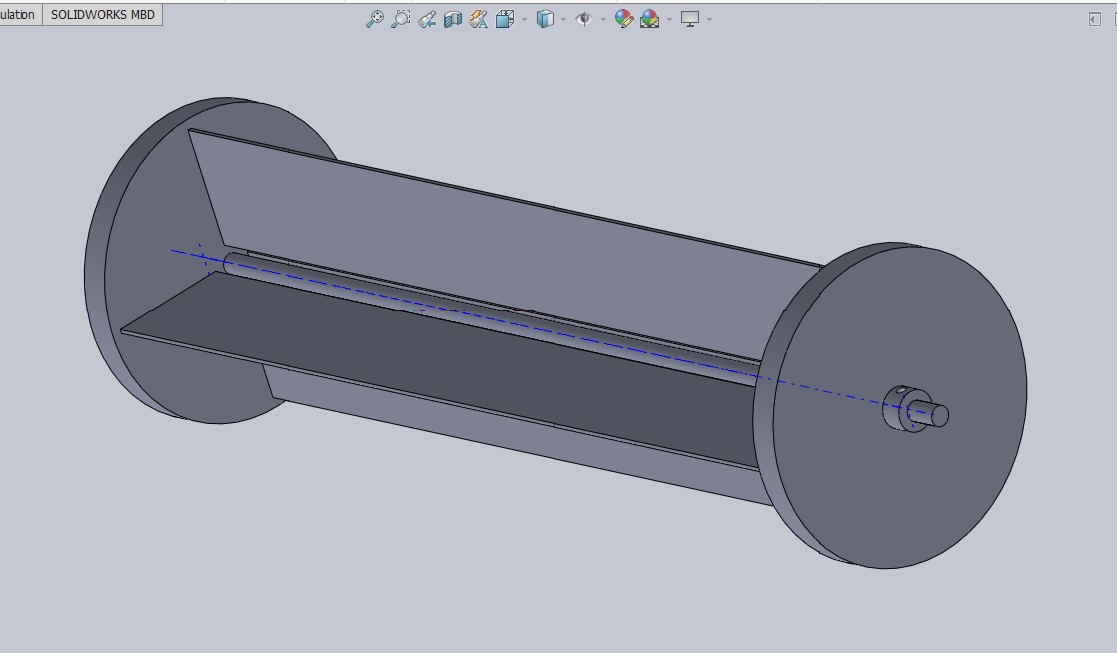
検証実験や意見聴取、および、定例会において議論を重ねた結果として図5に示した敷き藁の散布機構(フィーダ)に水車を模した装置(以降、水車機構)の追加を検討しています。設計した水車機構の外観と詳細を図8に示します。
この水車機構では、敷き藁の散布機構の上部にあるほぐし機構でほぐされた藁を一定量保持しながらも安定した散布を期待しています。図8に示した設計モデルを簡易的に作成し、敷き藁の散布についての実験を重ねています(図9参照)。特に水車機構に必要な羽の枚数、目標とする敷き藁の量(550g/m)とロボットの移動速度(3m/min)を満たす水車の回転数(rpm)等を調査しました。
なお、敷き藁の散布機構に関する発表については、2024年10月8日に学内で開催された卒業研究の中間発表会において、4輪独立姿勢制御機構を備えた敷き藁散布ロボットの開発(散布機構に関する研究)と題して報告を行いました。