4輪型移動機構の開発においては、駆動機構と姿勢制御機構の2つについて開発を実施しています。
(駆動機構)
開発中の4輪独立姿勢制御機構を備えた敷き藁散布ロボットでは、圃場内の移動が主な目的となります。そのため、宗像市池浦に整備されている圃場を利用することによって、不整地を移動する際に必要となるモータのトルクについては、シミュレーションによる計算と本事業1年目で購入した移動台車を用いた実験による算出を実施しました。
また、要求される移動速度が3m/minであることから、モータの回転数やギヤ比についても設計・選定を実施しました。それらの結果に基づき、モータ、チェーン、制御用ジョイスティック、車輪の選定を実施し、必要となる部品を発注しながら開発を進めていました。
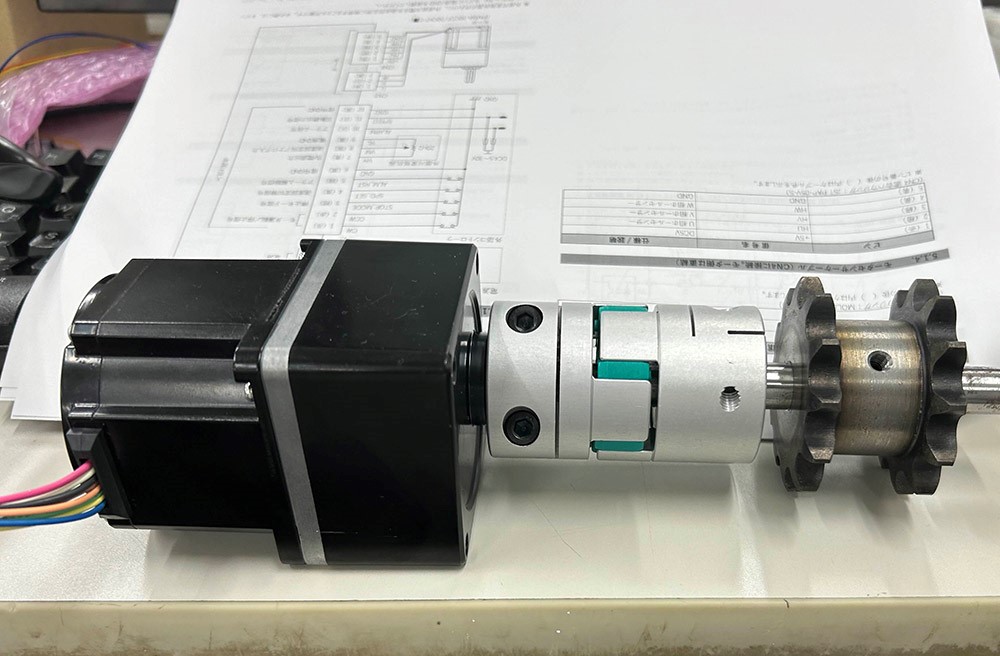
特に、移動ロボットにおいて4輪を駆動する必要があるため、図10に示すように本体の左右に搭載する1つのモータから2段のスプロケットによって2つの駆動輪に動力を伝える機構を設計・開発中です。また、モータの制御についてもマイクロコンピュータによる制御設計・プログラミングを行い、目標となる移動速度(3m/min)を実現するための機能を開発中です。
なお、敷き藁の移動機構に関する発表については、2024年10月8日に学内で開催予定の卒業研究の中間発表会において、4輪独立姿勢制御機構を備えた敷き藁散布ロボットの開発(ジョイスティックによる半自動制御について)、および、(移動に最適な駆動機構の設計について)と題して2件の報告を行いました。
(姿勢制御機構)
本事業1年目の検証結果から、圃場にある畝の凹凸により敷き藁の散布機構に傾きがあった場合には、散布量の左右で明らかな違いを確認しています。そのため、開発中の移動機構には4輪独立の姿勢制御機構を搭載し、圃場の凹凸に対応してロボット上面を水平に保つ必要があることが明らかになっています。
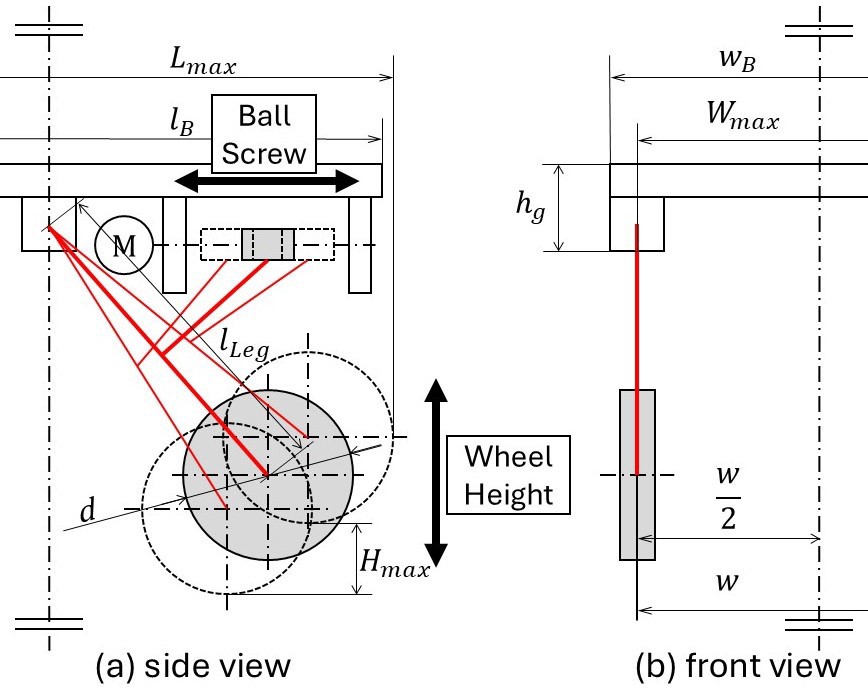
本事業1年目に開発したロボットについて,後述する⑤農作業への最適化(耐久性・防水性)の研究も考慮しながら、姿勢制御機構の部品やリンク機構の位置関係、姿勢制御用モータの取り付け位置などについて、実機のブラッシュアップを実施しました。開発中の実機とその動き(模式図)を図11および図12に示します。車輪が変形のないナイロン製のプレートを使用しているのは、姿勢制御機構の有用性をゴム製のタイヤなどの変形なしに正確に制御・計測するための措置であり、最終的には圃場の凹凸に対応するゴム製のタイヤに交換予定です。
なお、ロボットの姿勢制御機構に関する発表については、2024年10月8日に学内で開催された卒業研究の中間発表会において、4輪独立姿勢制御機構を備えた敷き藁散布ロボットの開発(姿勢制御機構について)と題して報告を行いました。
また、2024年12月18日から20日まで岩手県盛岡市・アイーナいわて県民情報交流センターで開催された「第25回計測自動制御学会システムインテグレーション部門講演会(SI2024)」にて講演を行いました。なお、原稿には、謝辞として「競輪の補助を受けて実施」旨を記載しました。
講演会当日は、対面によるオーラルのショートプレゼンテーションとポスターによるインタラクティブセッションがあり、発表用PPTやポスターには、ロゴマークや謝辞を示すことで、本研究活動が公営財団法人JKAの支援による活動であることを学会参加者等に周知しました。