九州産業大学 理工学部機械工学科
研究紹介Research
ロボット収納庫
柔軟被覆と爪を持つロボット指先
ロボット指先型触覚センサ
把持物体の形状を考慮した多指ロボットハンド物体操作
初期把握の変更に基づく多指ロボットハンドによる物体操作計画
柔軟被覆と爪を持つロボット指先
ロボット指先型触覚センサ
把持物体の形状を考慮した多指ロボットハンド物体操作
初期把握の変更に基づく多指ロボットハンドによる物体操作計画
柔軟被覆と爪を持つロボット指先
人間の指先の皮膚と爪の機能をロボット指先で実現するため、シリコン製の柔軟被覆とアルミ製の爪を持つロボット指先の研究を行っています。
| 柔軟被覆と爪を持つロボット指先 | ページめくり操作 |
|---|---|
 |
 |
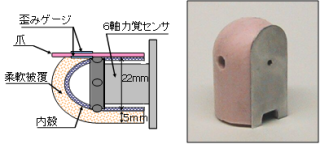
ロボット指先型触覚センサ
人間の指先が持つ繊細な触感覚をロボット指先で実現するため、 柔軟ロボット指先と6軸力覚センサを組み合わせたロボット指先型触覚センサの開発を行っています。
| 物接触点位置の計測 | 物体エッジ方向の計測 |
|---|---|
 |
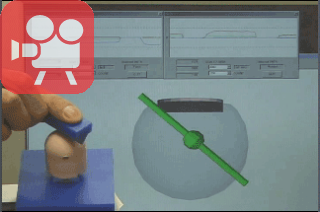 |
把持物体の形状を考慮した多指ロボットハンド物体操作
なぞり操作中に物体の端で指先を止めるなど、物体の形状に合わせた物体操作を行うための触覚センシングとハンド動作計画の研究を行っています。
| 物体なぞり操作(操作失敗) | 物体なぞり操作(操作成功) |
|---|---|
 |
 |
| 物体回転操作(操作失敗) | 物体回転操作(操作成功) |
|---|---|
 |
 |
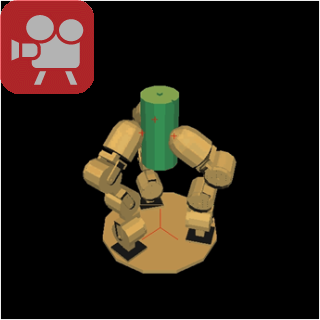
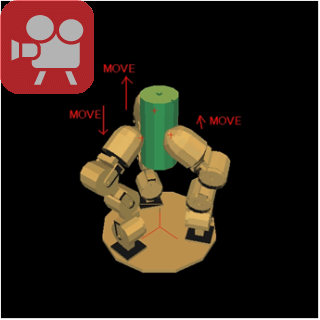
初期把握の変更に基づく多指ロボットハンドによる物体操作計画
多指ロボットハンドで、物体の最初の持ち方をどうすれば指先の滑りなどが起こらずうまく物体操作が行えるかという研究を行っています。
| 初期把握1による物体操作(操作失敗) | 初期把握2による物体操作(操作成功) |
|---|---|
 |
 |